close the yellow drawer
Project Page
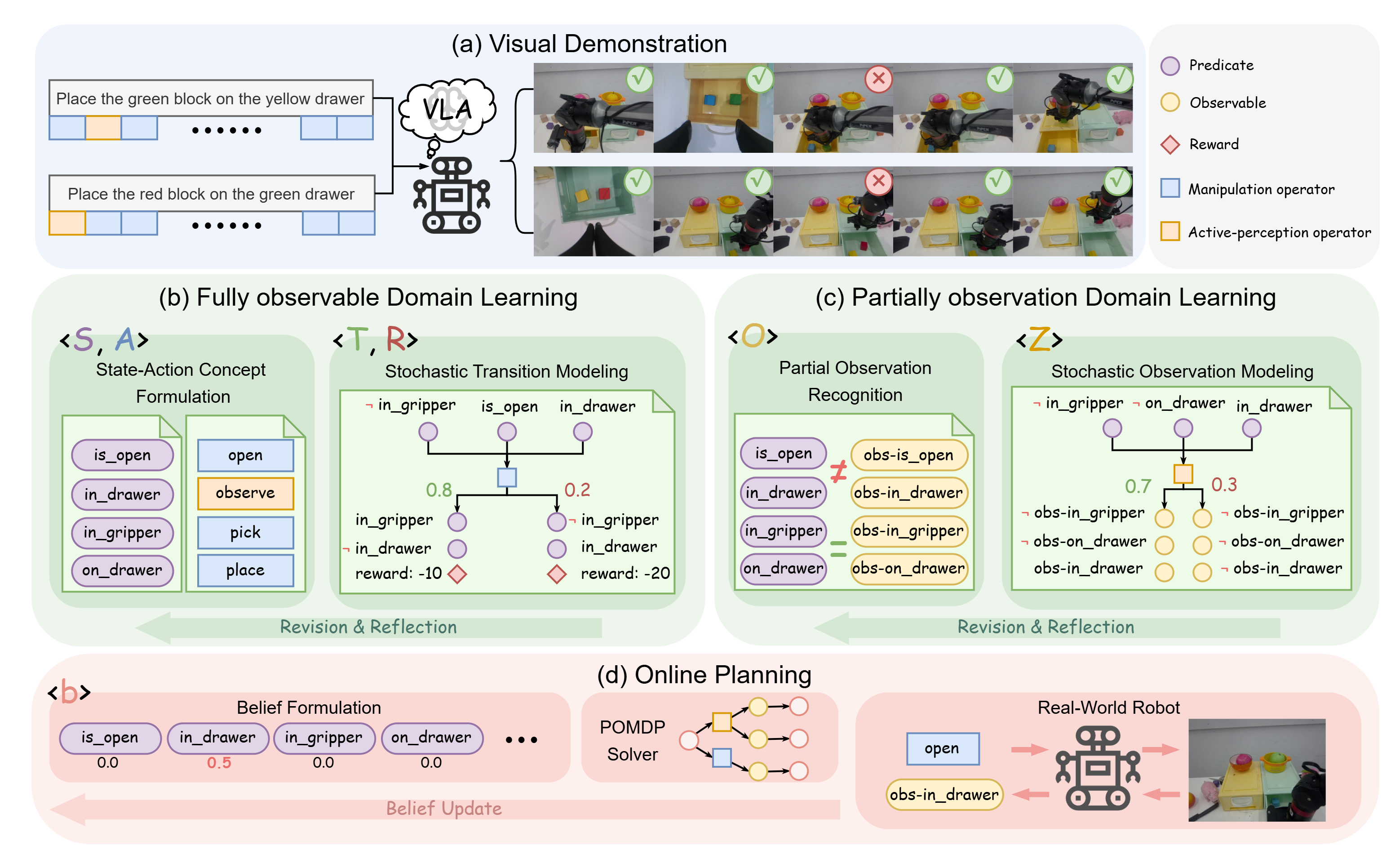
PO-PDDL: Learning Symbolic POMDPs from Visual Demonstrations for Robot Planning Under Uncertainty
Video Presentation
Visual Demonstrations
place the cup with water on the top of the green drawer
pick up the red block and place the red block on the top of the yellow drawer
open the yellow drawer
place the pink cup on the top of the green drawer
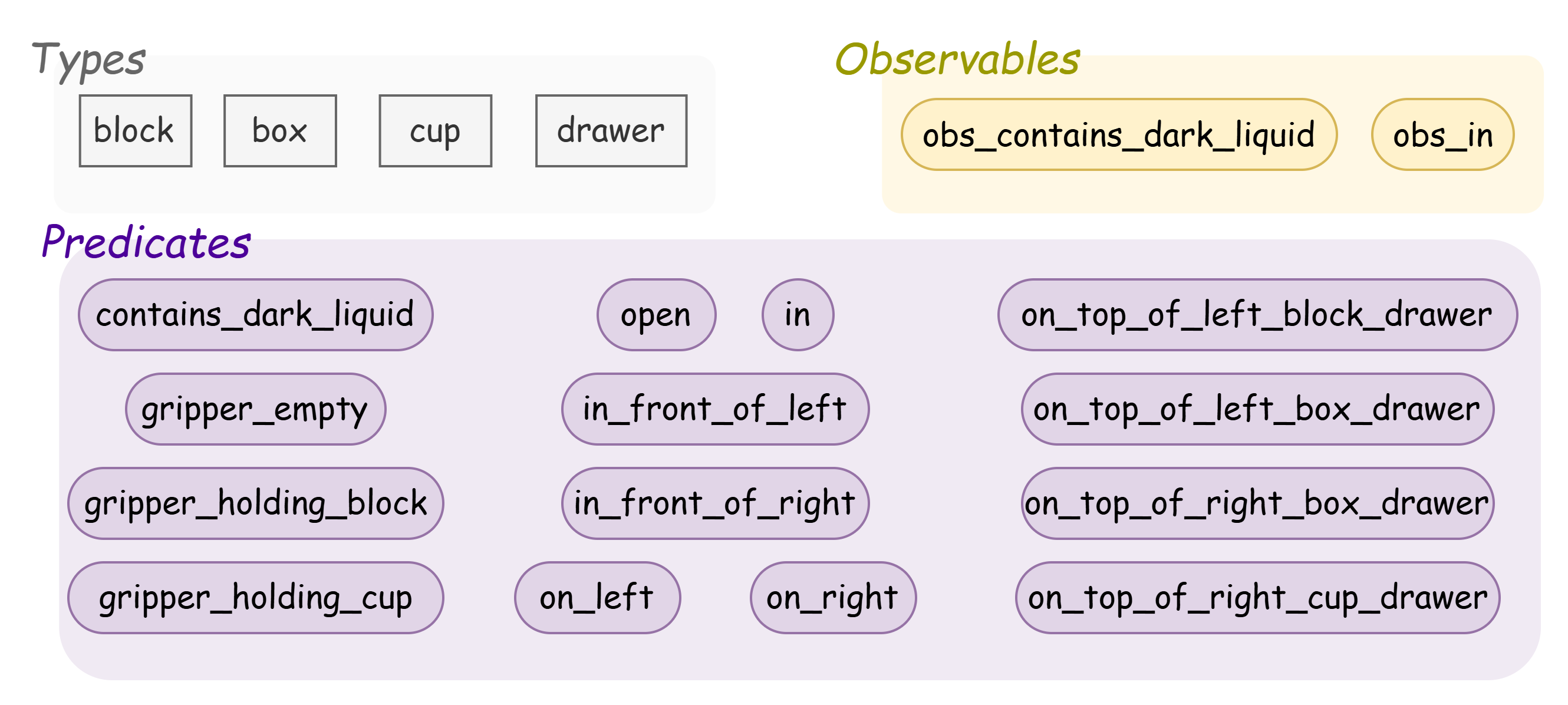
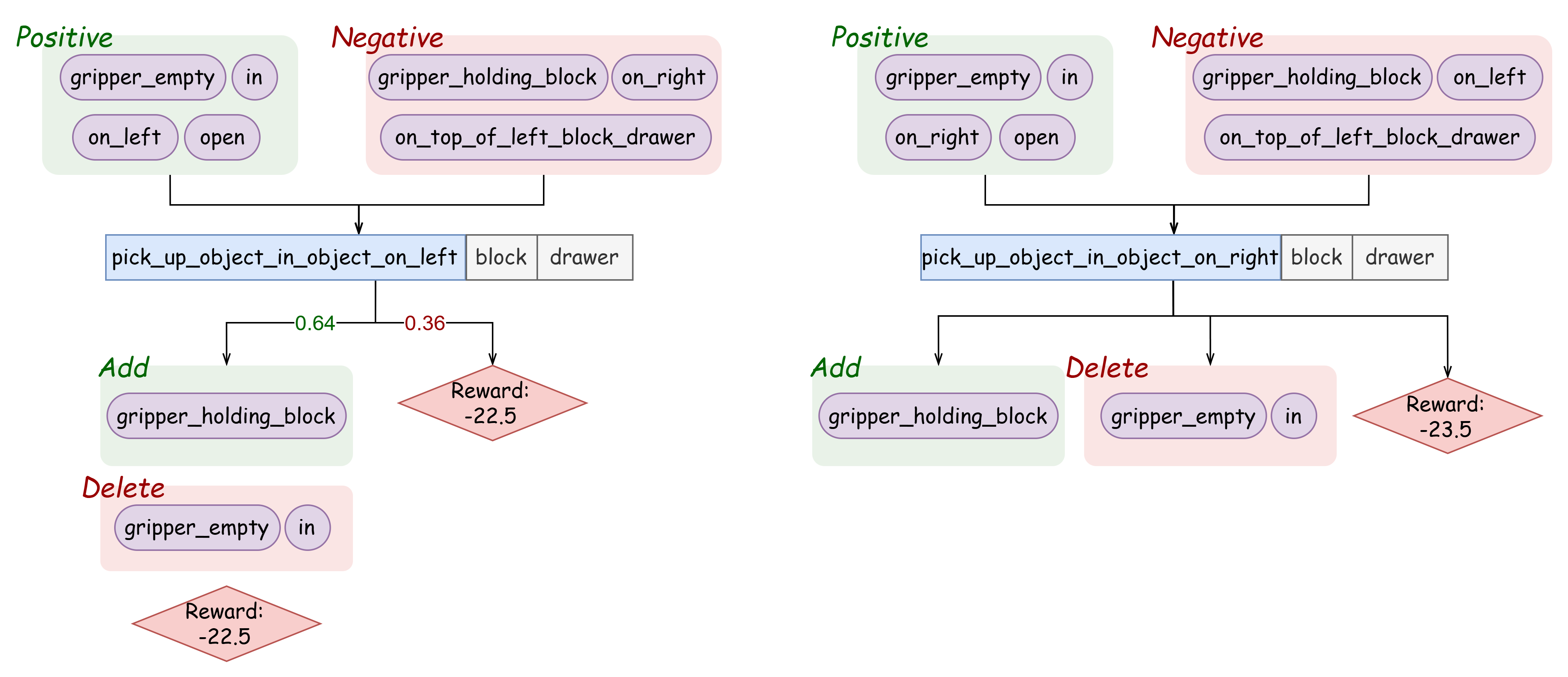
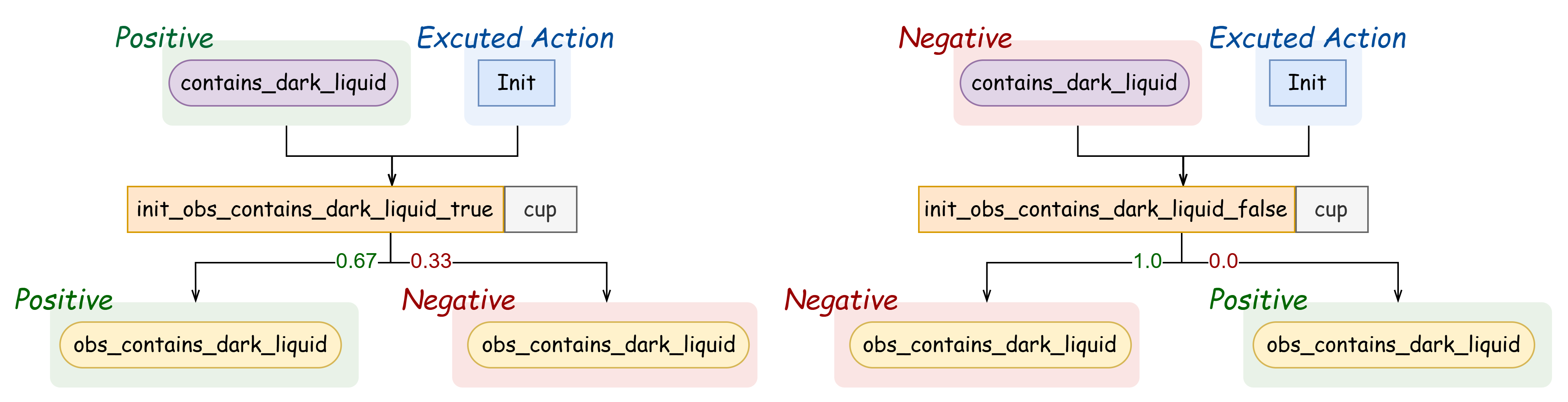
Generated Domain from Demonstrations
Online Planning with the Learned PO-PDDL Domain
put all the blocks in the same drawer, and close all the drawer.
click to view the problem fileplace all the cups with dark liquid on the top of the green drawer on the right, and keep all the cups without dark liquid on the table.
click to view the problem filepush the black box to the top of the yellow drawer.
click to view the problem fileput one of the blocks on top of one of the drawers, and close all the drawer.
click to view the problem fileput all the blocks in the same drawer, and close all the drawer.
click to view the problem file